有史以來,第一次完成戶外5公里跑步的機器人誕生。近日,俄勒岡州立大學的研究人員讓一個兩足機器人 Cassie完成了上述跑步。
憑藉纖細的紅腿、鴕鳥的步伐和腹部的推力,它在53分鐘內跑完全程,沒有系安全帶,並且只充了一次電。
「這是機器人第一次學會走路和跑步,並成功地越過人類地形和正常地形」,俄亥俄州立大學機器人教授、Agility robotics創始人和 CTO喬納森・赫斯特(Jonathan Hurst)表示,「這是真實世界的環境,不是在跑步機上的實驗室那種東西。」
據悉,Cassie是一個兩腿機器人,由俄勒岡州立大學孵化出來的公司 Agility Robotics製造,曾獲得美國國防部高級研究計劃局的100萬美元撥款。
研究團隊耗時16個月研發完畢,並於2017年首次推出 Cassie,目前一台售價大約7萬美元。該公司官網表示:「我們的最後一次 Cassie交付發生在2019年7月,(目前)不再可供購買。」




2020年,該校剝離出 Agility Robotics,不過該公司一直在推動雙足機器人的商業應用。據介紹,Cassie是通過深度強化學習算法學會了跑步能力,它還能在轉換位置或運動時保持平衡。


概括來說,該團隊將生物力學知識、機器人控制方法、以及機器學習工具相結合,最終塑造了 Cassie。
同時,Cassie也是該公司的第一款產品,它穩定、精確的步伐參考了鳥類步態。和鴕鳥一樣,Cassie臀部有三個自由度,腳踝柔韌有力,但膝蓋只能單向彎曲。它的整個底盤非常輕,能以比較自然的方式去吸收衝擊,就像人類走路一樣。
不同於波士頓動力公司(Boston Dynamics)的四足機器人,對於四條腿站立的機器人,很難用外部物體把它撞倒。而 Cassie是兩條腿,因此似乎更容易被撞倒。但該團隊表示,這種情況或將改變,因為新的深度學習技術可讓兩足機器人在移動過程中,開發出自我穩定的新方法。
儘管如此,這些方法也並非完美無缺。此次 Cassie的運行時間包括大約6.5分鐘的故障排除時間,在5公里跑中跌倒了兩次,期間研究人員處理了電腦過熱和一個糟糕的轉彎,這導致 Cassie的主機從腿上摔了下來。
但是,赫斯特仍然相信,兩足機器人將成為常態,並與人類融合在一起。其潛在應用場景主要在於災後搜救、物流包裹運送和家庭智能服務等。
對於此次成績,浙江之江實驗室 PI研究員、前本田技研先端中心研究員、大坂大學博士&特聘研究員付春江告訴 DeepTech,對能耗的追求其實在美國 DRC機器人挑戰賽中就已初見端倪,相比傳統的剛體機器人比如 ASIMO和 ATLAS,斯坦福研究院的 SRI的 DURUS在更早之前、就已實現較長時間的行走。
而此次 Cassie把雙足機器人的節能性推到了新高度。舉例來說,智慧型手機之所以成為日用品,就是起碼能保證一天一充電。其實,之前 Cassie已實現連續工作數小時,只不過那時它採用的控制方法需要限制步幅,即仍然停留在行走這種方式。
而此次的5公里,是在慢跑步態下實現的,確實更具衝擊力。不同於全地形和全身動作,行走的學習控制核心思路也沒有慢跑的複雜。而從俄勒岡州立大學 ICRA2021的控制框圖可以看到,在承擔主要非線性、非連續動力學任務時,仍是讓降維模型的穩定周期運動來作為步態庫,去對控制策略網絡進行引導。
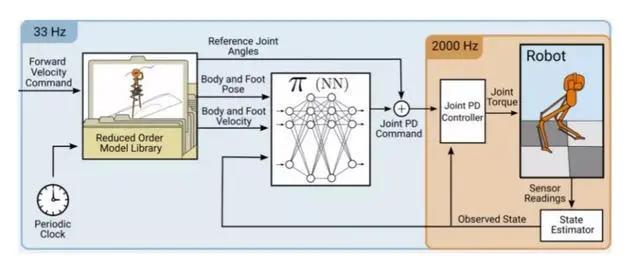
圖|俄勒岡州立大學 ICRA2021的控制框圖(來源:資料圖)
付春江指出,相比之前純粹的強化學習,這可省去不少訓練量。當然,全步態學習包括跑步有著更複雜的無模型學習方法、回報設計、系統調參和軟硬體遷移,但主要還是依賴大規模仿真數據。
該團隊於2021年發表的一篇論文指出,周期回報組合設計是其關鍵。此外如下圖所示,該研究還用到了 LSTM網絡和 PPO訓練方法。
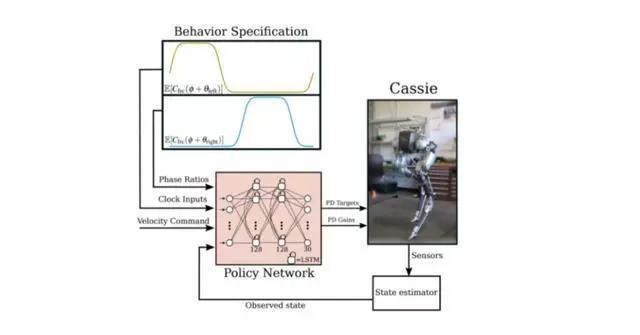
圖| LSTM網絡和 PPO訓練方法(來源:資料圖)
付春江表示,Cassie此次實現5公里慢跑,是抗擾柔性硬體結構、調試數據、經驗的積累、以及強化學習的綜合積累結果。

Cassie的「妹妹」 Digit更具實用性
目前該公司還研發了 Digit機器人。據悉,Digit上身集成了傳感器和兩個4自由度臂,還有一個用於額外計算和自定義負載集成的托架。

圖|研究團隊和 Digit
它的實用性更強,只需少量額外編程即可執行簡單的任務。據介紹,Digit於2018年開始開發,並於2020年中期推向市場。Digit具有穩健的步行和跑步步態,具備爬樓梯、以及自主導航的感知能力。
目前, Digit已可用於搬運包裹。

圖| Digit
即便遇到台階,它仍可以搬著包裹上去。

圖| Digit
赫斯特曾表示,該公司正在和福特公司合作,主要想解決最後一公里問題。Digit的獨特設計讓它可以被折迭,平時放在汽車後備箱即可隨車攜帶,一旦車輛到達目的地,就可讓 Digit抓取包裹、並執行交付過程的最後一步。

創始人曾不被看好,為此曾將 Cassie送給好友做研發
談及 Agility Robotics和高校的合作模式,付春江表示,公司與高校合作的最大收益是試錯。他說,Agility Robotics創始人赫斯特在卡耐基梅隆大學(CMU)讀書時是硬體出身,期間設計了很多串並聯彈性元件、變阻抗機構。

圖|左一為 Agility Robotics的 CTO喬納森・赫斯特(Jonathan Hurst)
赫斯特對剛柔混合結構十分執著,並相信通過硬體的實踐創新,可以倒逼控制的發展,但是當時 CMU機器人學院院長克里斯・阿特金森(Chris Atkinson)不是很支持他。比較幸運的是,密西根大學機器人研究所所長傑西・格里茲爾(Jessy Grizzle)很看好赫斯特的工作。

由於當時混合零動力控制這條線在處理跑步時,需要加入彈性倒立擺模型作為零動力核心。在實現彈簧倒立擺的基礎上,彼時已在俄勒岡大學教書的赫斯特、及其學生安迪・阿巴特(Andy Abate)嘗試過很多構型,最終發現串並聯混合模型加玻璃纖維板,不僅能在一定工作空間上實現彈性倒立擺模型,還能在末端工作空間形成剛度橢圓抗地面干擾。

但柔性元件的加入對控制提出了新要求,因為無法找到證明穩定性的多項式形式的李雅普諾夫函數。所以 Cassie被發到赫斯特的高校「朋友圈」,並嘗試了不同的方法。
比如前哈佛大學約翰・A・保爾森工程與應用科學學院的工程與計算機科學助理教授、現波士頓動力的 Atlas團隊負責人斯科特・昆德斯馬(Scott Kuindersma)就曾在 Cassie身上嘗試強化學習的方式;密西根大學的傑西・格里茲爾(Jessy Grizzle)則使用了非線性控制的方式;加州理工學院機械和土木工程、以及控制和動力系統的教授亞倫・艾姆斯(Aaron Ames)用的是魯棒優化控制的方式。
後來,斯科特・昆德斯馬跳槽到波士頓動力,強化學習的嘗試也被移交給加拿大不列顛哥倫比亞大學的計算機科學系教授米歇爾・范・德・帕內(Michiel van de Panne),並於2018年取得應用性突破。Agility Robotics確認效果後收回到自己公司,並開始大力投入此方向。

付春江補充稱,Agility Robotics公司的理念就是讓人形機器人走到人能去的任何地方。

圖| Agility Robotics的產品疊代進程
同時,Agility Robotics也在積極擁抱資本,2018年該公司獲得800萬美元的資金,投資方分別是此前投資者 Robotics Hub,以及新加入的 Playground Global和索尼創新基金。2020年,該公司再次獲得2000萬美元的投資,這次的融資額度和投資人數都比上次更多。
而關於兩足機器人在國內的發展,付春江表示:「國內仿人雙足機器人經過長期積累和發展,已經達到或部分超過國際一流水平,比如北京理工大學的硬體性能,優必選公司的人機互動多樣性,浙江大學和南方科技大學的新型控制等。
最近的科研範式開始轉向公司、高校、研究所大規模混合制趨勢,比如谷歌的 AlphaFold2論文有34個不同領域行業的大牛作者,參與支撐的人數肯定也遠超這個數字。因此國內雙足機器人若想達到國際頂級水平,可能還需要有力部門組織深入合作,並召集海外學者貢獻創新力量。」




















{kind=link}