李飛飛團隊的機器人模擬訓練場2.0版本來了!
這個擁有超過8000個互動式場景的模擬環境iGibson,再次發生了進化!
而進化之後的iGibson2.0,核心就一句話:
機器人們別抓小球兒了,來做家務吧!
像是模擬環境中增加的溫度、濕度、切片等多種物理狀態,就亟待各位機器人來個洗、切、炒菜一條龍服務:
而且這可是外表顏色會發生改變的真·煮熟。
做完飯之後,還能擦一下台子上的污漬,整理一下桌面。
再把沒用完的蔬菜放回冰箱,看著它變成「冰凍」狀態。
人類還能通過VR進入模擬環境,給機器人示範下如何做一個標準的家務:
那麼現在,就一起來看看這次版本更新的具體內容吧。
新增5種物理狀態
好的,現在我們的機器人選手進入了模擬環境,它將要做一頓菜。
而這頓菜,將會用到這次iGibson2.0擴展的五個新的物理狀態:
濕潤程度
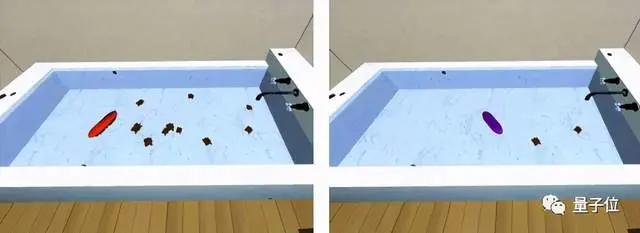
先從洗菜開始。
洗菜的水來自一種流體模擬系統。
比如下方這個水槽上的水龍頭:

水龍頭作為液滴源產生液滴,然後匯聚在其他容器(盤子)里,或被可浸泡的物體(毛巾)吸收。
在iGibson2.0中,物體吸收的液滴量也就對應了物體的濕潤程度。
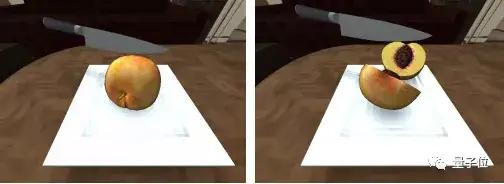
切割
洗完了,開始切菜。
但這裡就碰到了一個難題:
一般來說,模擬環境中的物體會被假定為具有固定節點和三角面的三維結構,要實現「切割」這一動作並不簡單。
而iGibson2.0則通過更新切片狀態、保持物體實例的擴展狀態來完成切割動作。
當拿著切片工具,並作用了超過物體切片力閾值的力時,切片狀態就會轉為「真」。
這時,模擬器會將會將一個物體替換為兩個:
這兩半「被切開的物體」則會繼承整個對象的擴展物體狀態(如溫度)。
而這種轉換是不可逆的,在之後的模擬時間中,物體會一直保持這種切片狀態。
溫度
現在,我們要使用這個微波爐來煎魚了:

要讓溫度自然變化,iGibson2.0便將WordNet層次結構中的對象類別注釋為熱源。
這是iGibson2.0中的一個新規定:
即每個模擬對象都應該是WordNet中現有對象類別的一個實例。
而這種語義結構能夠將特徵與同一類別的所有實例聯繫起來。
好,現在我們要通過這個熱源來改變改變其他物體的溫度。
和現實中的微波爐一樣,用手撥動後受熱物體就會開始升溫。
具體溫度會這樣變化:

△∆sim:模擬時間 r:熱源變化率
並且,每個物體在過去達到的最高溫度的歷史值也會被保留。
比如上圖中的魚,在過去曾達到過烹飪或燃燒的溫度。
因此即使在熱源關閉後,它也會呈現出被烤熟或燒焦的外觀。
也就是說在模擬環境中如果烤糊了,那也就是真的烤糊了!
清潔程度
清潔程度換句話說,就是含有灰塵污漬的程度。
在iGibson2.0中,對象初始化時可以含有灰塵或污點顆粒,還能採取行為來改變物體的清潔度。
因此,在做完菜後,機器人可以選擇用布擦拭灰塵顆粒:
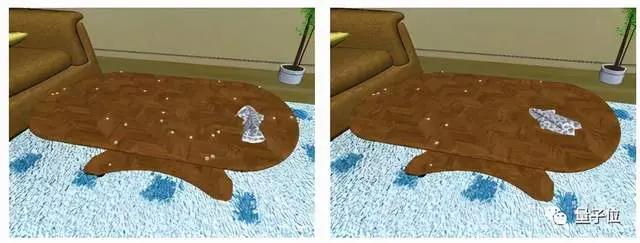
或者選用濕的工具(擦洗器)來清除來清除污漬:
狀態切換
iGibson2.0為一些對象提供「開」和「關」兩種狀態的切換功能,並同時維護其內部狀態和外觀變化。
這種狀態的切換是通過觸摸一個虛擬固定連結TogglingLink來完成的。
比如下方這個烤箱,在「開啟」狀態(右圖)時,其外觀會發生改變。
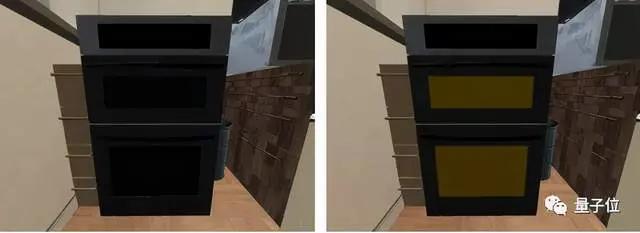
於是最後,機器人關掉器械,圓滿完成了這次任務。
而這樣一個穩固、逼真、便捷的模擬環境,自然也就意味著機器人能夠進行更多、更複雜的任務訓練。
基於邏輯謂詞的生成系統
加上前面這些新的物理狀態後,就足以模擬室內環境中的一系列基本活動。
不過如果用我們平常生活中的自然語言來描述這些狀態的話,emmm……
就像是重慶人的「微辣」之於外地人一樣,一定會存在個體理解上的語義差異。
因此,iGibson2.0以常見的自然語言為基礎,定義了一組邏輯謂詞(Logical Predicates):
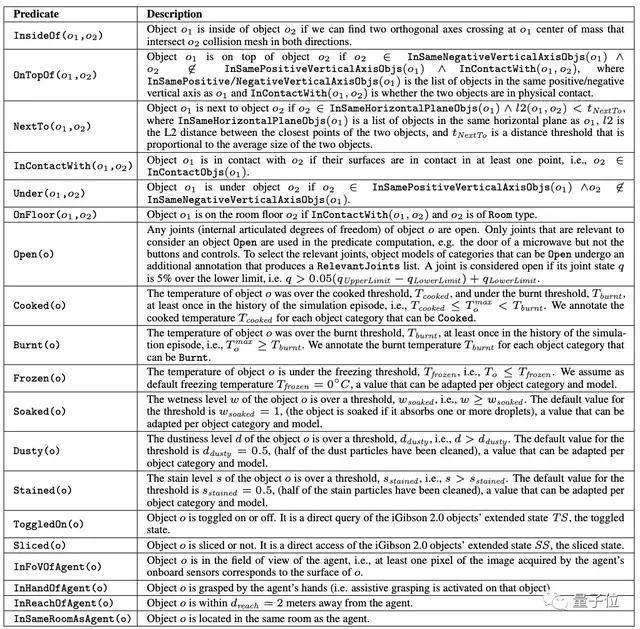
這組邏輯謂詞將擴展的對象狀態映射到對象的邏輯狀態上,以符號化方式描述對象的狀態。
基於不同的邏輯謂詞,我們會對有效對象進行不同的採樣。
比如,對於像是Frozen這種基於物體擴展狀態的謂詞,就對滿足謂詞要求的擴展狀態值進行採樣。
而如果是OnTopOf這種運動學謂詞,就需要結合射線投射、分析方法等機制,來保證物體處在一個靜止的物理狀態。

那麼這時,我們就得到了一個基於邏輯謂詞的生成系統。
在這一系統中,我們只要指定一個邏輯謂詞的列表,就能更加快速、便捷地生成模擬場景。
VR讓機器人學著人類做
現在,機器人訓練的場地已經搭建好了。
我們的最終目標,是讓機器人通過訓練來完成越來越複雜的任務。
那麼,或許可以讓機器人來看看人類是怎麼做的,進而開發出新的解決方案?
於是,iGibson2.0引入了VR,讓人類也能進入機器人訓練的場景中:
團隊根據通過OpenVR與市面上主要的VR頭盔兼容,並有一個額外的跟蹤器來控制主體。
通過iGibson的PBR渲染功能,系統會以最高90幀/秒的速度接收從虛擬化身的頭部視角生成的立體圖像。
而通過人類在VR環境中完成任務的流程,研究人員也能更加便捷地收集到長期、複雜、雙手動移動操作任務的演示數據。
當然,抓小球的經典任務也不能忘。
為了提供更自然的抓取體驗,團隊實現了一個輔助抓取(AG)機制:
在用戶通過抓取閾值(50%驅動)後,只要物體在手指和手掌之間,就能在手掌和目標物體之間形成一個額外的約束。
媽媽再也不用擔心機器人抓不住小球了
而最後,李飛飛團隊也表示:
iGibson是一個完全開源的、面向大型場景交互任務的模擬環境。
我們希望iGibson2.0能成為社區有用的工具,減少為不同任務創建模擬環境的負擔,促進具身AI(embodied AI)研究的解決方案的發展。




















{kind=link}